

(From Technion Promotional Video)
The Technion in Haifa and the Jacobs-Technion Cornel Institute in New York have conducted a study using the OpenStreetMap mapping system in order to give the blind greater freedom of movement in public spaces. Achituv Cohen of the Environmental Crowdsourcing Lab and Assistant Professor Sagi Dalyot of the Technion conducted the research.
OpenStreetMap is an open-source mapping infrastructure based on crowdsourcing of geographic data contributed by citizens all over the world. OpenStreetMap provides maximum flexibility in terms of inserting, editing, and analyzing. It also integrates accumulated mapping data and spatial information.
You see the blind every day on the street. They use their canes and sometimes help from a Seeing Eye dog to get around. In some places street intersections the lights which signal pedestrians to cross the street make sounds to let the blind know. But how do they read maps? How can they use all of the GPS based aps on smart phones? This was what the Technion researchers set out to do: find a way to let blind people take advantage of the tech which the rest of us take for granted.
[embedded content]
The researchers state: “In order to develop an algorithm for planning optimized walking routes for blind pedestrians, we first needed to understand what renders a route safe and accessible for this specific population – especially in urban environments. To do so, methodical, user-centered interviews were conducted with both blind pedestrians.”
The instructors were mainly from Migdal-Or, a non-profit organization that provides rehabilitation services for people with visual impairment or blindness throughout Israel. These highly trained instructors have knowledge and extensive experience in serving numerous blind people every year.
Assistant Professor Sagi Dalyot Technion Viedo
The researchers also observed the participants navigating in an urban environment and participated in training sessions with blind pedestrians, where users practiced their routes with the guidance of the OMI. They wanted to understand the concerns of blind pedestrians when walking in urban environments, what renders navigating along a certain route either challenging or accessible, and which methods most help blind pedestrians improve their wayfinding and navigation capabilities.
The researchers explained that “millions of blind people around the world face challenges and obstacles when attempting to perform the most basic tasks, such as walking to the corner store or using public transportation. As blind pedestrians lack critical information about the space they traverse outside the familiarity of their home, they are restricted, dependent on others, and have decreased quality of life. While assistive technologies for providing specific navigation solutions do exist, research is still limited regarding customized wayfinding solutions for blind pedestrians.
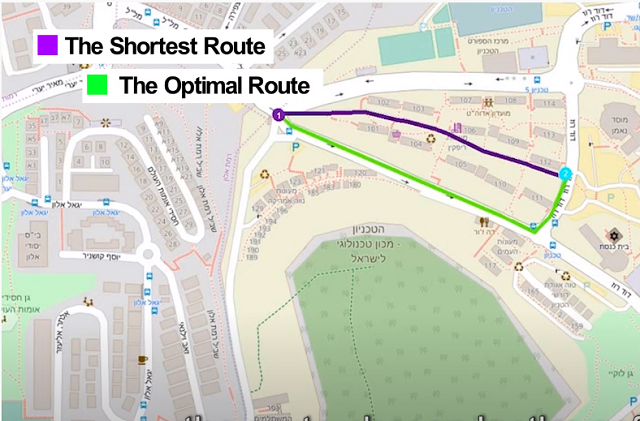
OpenStreetMap Screen Shot
A route planning software that generates optimized routes for blind pedestrians was developed. It was then tested on a variety of routes, with the help of blind volunteers and orientation and mobility instructors. The results show that the optimal routes generated by the software were identical or very similar to those suggested by the experienced orientation and mobility instructors. Moreover, the blind volunteers also stated that the software planned routes were indeed more accessible and safer for them to walk along compared to routes suggested by existing commercial software developed for seeing pedestrians.
“The findings of this research,” say the scientists, “indicate that our solution, based on OpenStreetMap and developed for the benefit of blind pedestrians, is effective and practical, and could improve the mobility, independence, and quality of life of this population, as well as increasing their integration into society.”

